| Introduction |
Basic Conceptions
| First-Order Differential Equations |
Directly Integrable Equations
Motion of a Body - Problem 1
Motion of a Body - Problem 2
Motion of a Body - Problem 3
The Spontaneous Radioactive of Substance
Separable Equations
Motion of Particals in Viscous Fluid
Newton's Model of Cooling
Model of Population
Homogeneous Equations
Linear Equations
Bernoulli Equations
Exact Differential Equations
| Differential Equations of Higher Orders |
Basic Conceptions
Equations of Special Kinds
Some Graphic Illustrations using MATLAB

| Some Graphic Illustrations using MATLAB |
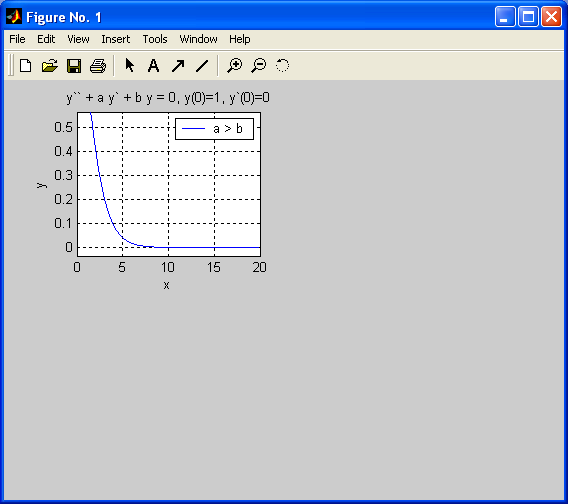
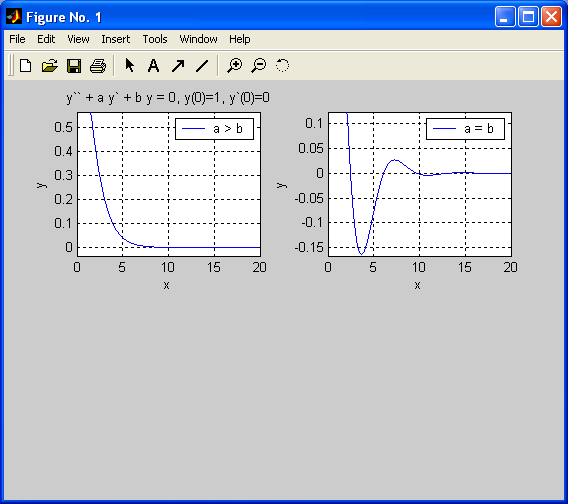
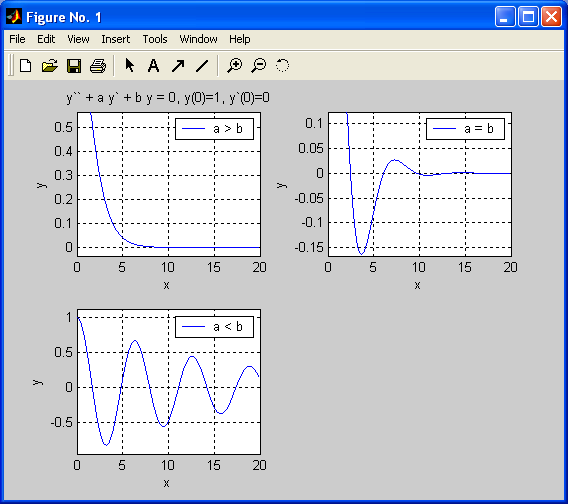
The main purpose of this section is to illustrate graphically the solutions to a differential equation, using a computer algebra system and technical computing environment such as MATLAB that in combination with analytical calculations gives the best way of using differential equations in the mathematical modeling and interpretation of real-world phenomena. Let us consider an initial value problem relative to the following differential equation of the second order, involving two arbitrary parameters, a and b:
![]() .
.
clear
clf
b=1; a = 2*b;
y = dsolve('D2y + a*Dy + b*y = 0', 'y(0) = 1', 'Dy(0) = 0', 'x')
subplot(221)
ezplot(y, [0,20])
title('y`` + a y` + b y = 0, y(0) = 1, y`(0) = 0')
ylabel('y'),
legend('a > b')
grid
pause
a = b;
y = dsolve('D2y + a*Dy + b*y = 0', 'y(0) = 1', 'Dy(0) = 0', 'x')
subplot(222)
ezplot(y, [0,20])
title('')
ylabel('y'),
legend('a = b')
grid
pause <>br
a = 1/8 * b;
y = dsolve('D2y + a*Dy + b*y = 0', 'y(0) = 1', 'Dy(0) = 0', 'x')
subplot(223)
ezplot(y, [0,20])
title('')
ylabel('y'),
legend('a < b')
grid
pause
a =0;
y = dsolve('D2y + a*Dy + b*y = 0', 'y(0) = 1', 'Dy(0) = 0', 'x')
subplot(224)
ezplot(y, [0,20])
title('')
ylabel('y'),
legend('a = b')
grid
 .
. .
. .
.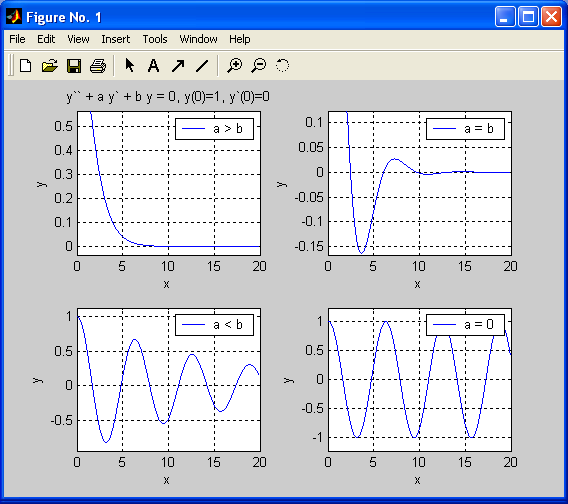 .
.MATLAB produces the following solutions, correspondingly:
1. y = exp(-x)+exp(-x)*x
2. y = exp(-1/2*x)*cos(1/2*3^(1/2)*x)+1/3*3^(1/2)*exp(-1/2*x)*sin(1/2*3^(1/2)*x)
3. y = 1/255 * 255^(1/2) * exp(-1/16 * x) * sin(1/16 * 255^(1/2) * x) + exp(-1/16 * x) * cos(1/16 * 255^(1/2) * x)
4. y = cos(x)
In each case, the solution differs from the others in a qualitative relation.
Case (1) corresponds to a damping process while in case (2) the solution gives quickly damped oscillations.
In case (3) we deals with slowly decreasing oscillations - in comparison with case (2).
Case (4) corresponds to harmonic oscillations.
|
|